事業紹介Business Infomation
制御モデリングのレパートリ
N研究所のモデリングフィロソフィー : まず実測時系列データがありき。種々アプローチがありますが、AI機械学習用モデリングに重点をおいています。
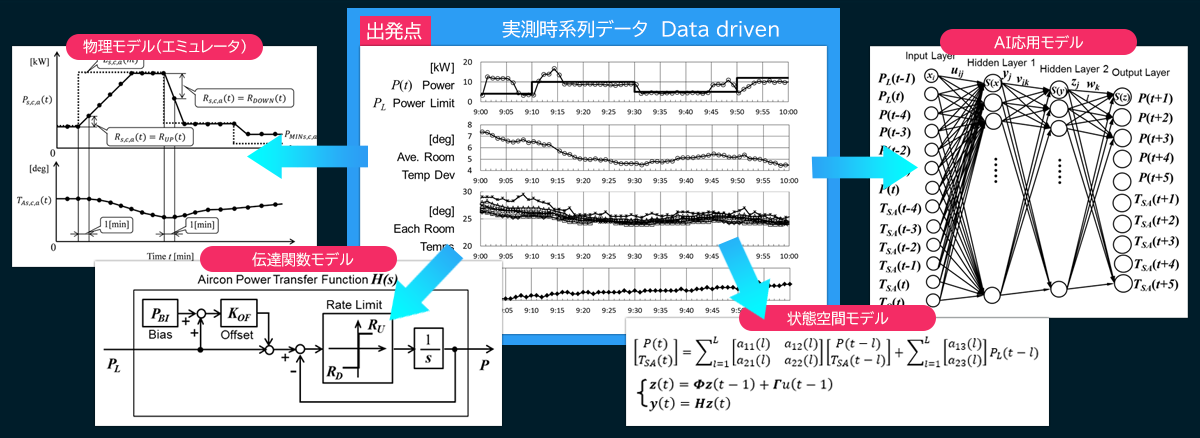
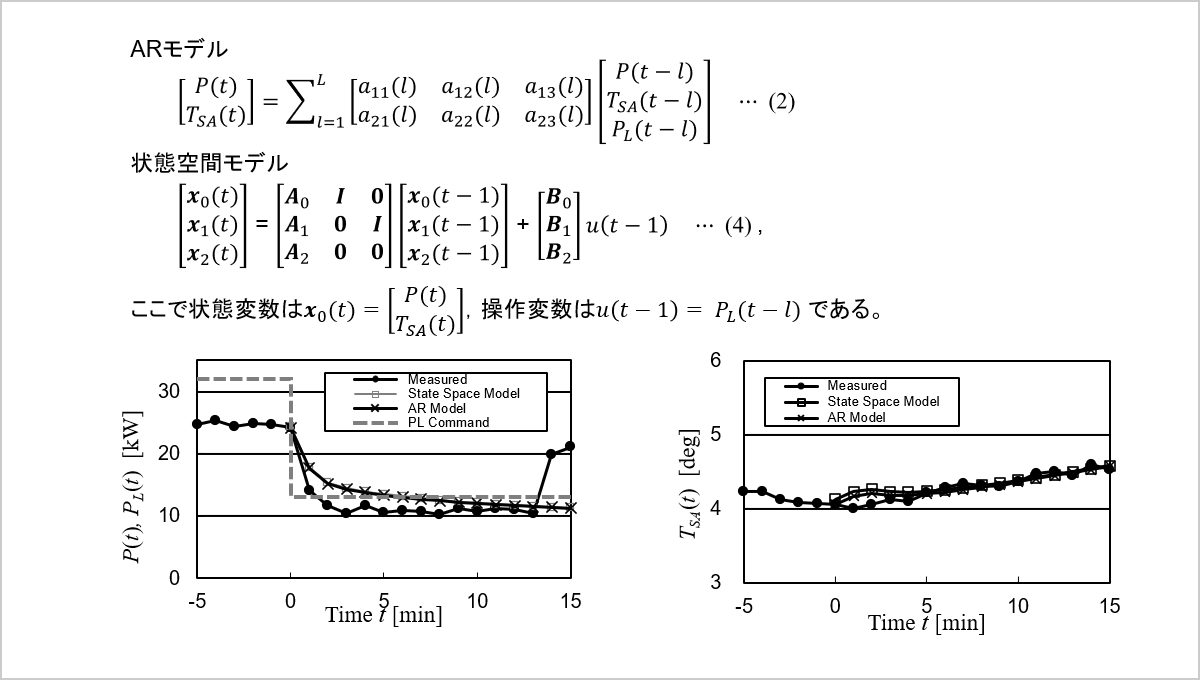
ARモデルから状態空間モデル
従来アプローチで、実測時系列データから現代制御理論の状態空間モデルを構築した例。
自己回帰(Auto Regression:AR)モデル経由で状態空間モデルにアプローチした例。
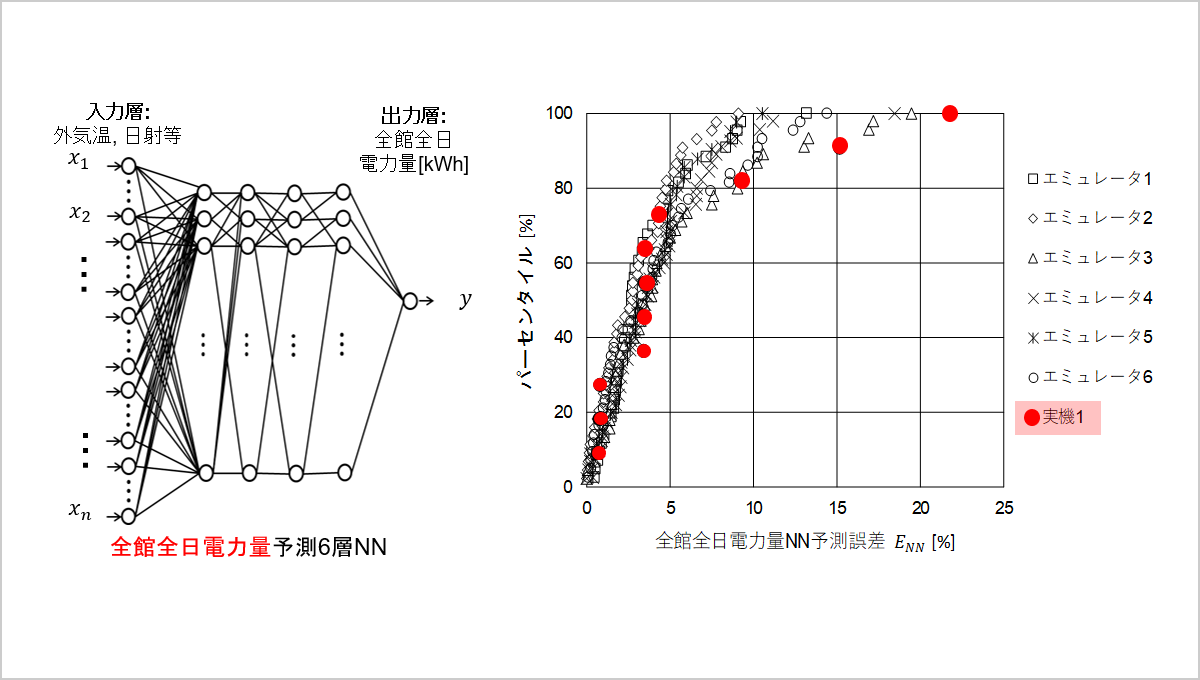
状態空間モデルではなく、ニューラルネットなどAI 応用モデリングを紹介します。
自己回帰(Auto Regression:AR)モデル経由で状態空間モデルにアプローチした例。
状態空間モデルではなく、ニューラルネットなどAI 応用モデリングを紹介します。
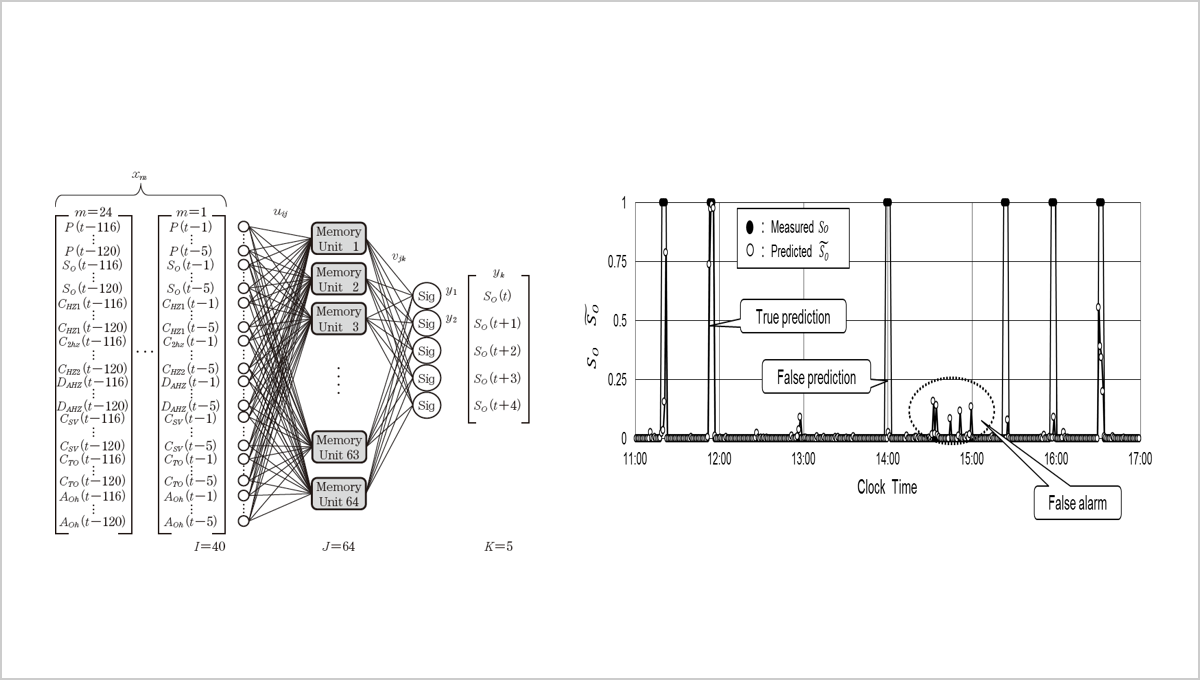
LSTMニューラルネット制御モデル
LSTM(Long Short Term Memory)ニューラルネットは、RNN(Recurrent Neural Network)の発展形。
長い時系列履歴を並列ではなく、順次入力していくと内部記憶されます。
MLPの場合のニューロンに相当する部分がMemory Unitであり、学習データに合うように履歴の内、長い時間記憶する時系列と短い時間で忘却する時系列を学習していく。
長い時系列履歴を並列ではなく、順次入力していくと内部記憶されます。
MLPの場合のニューロンに相当する部分がMemory Unitであり、学習データに合うように履歴の内、長い時間記憶する時系列と短い時間で忘却する時系列を学習していく。
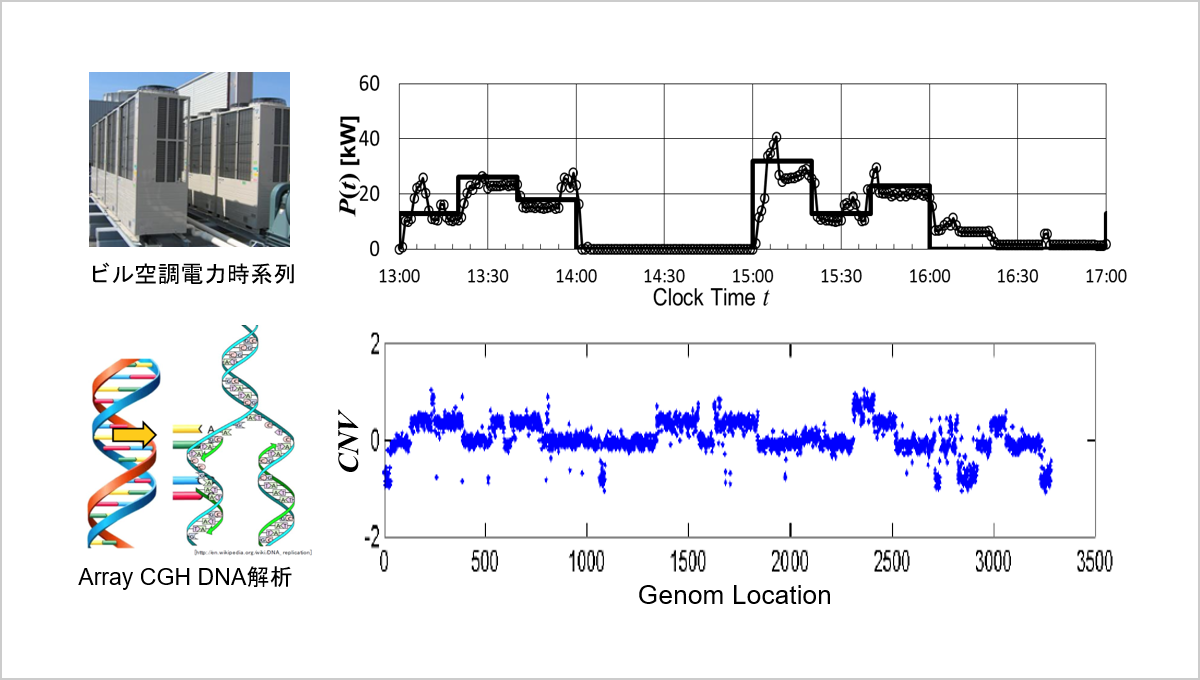
DNA解析法によるステップ時系列抽出
DNA解析における遺伝子コピー数(Copy Number Variation : CNV)の確率分布変化点を抽出する数学的手法 : BreakPoint法。
空調電力時系列データがステップ状に急変する点の抽出に応用。
CutOut法と併用増強。
空調電力時系列データがステップ状に急変する点の抽出に応用。
CutOut法と併用増強。
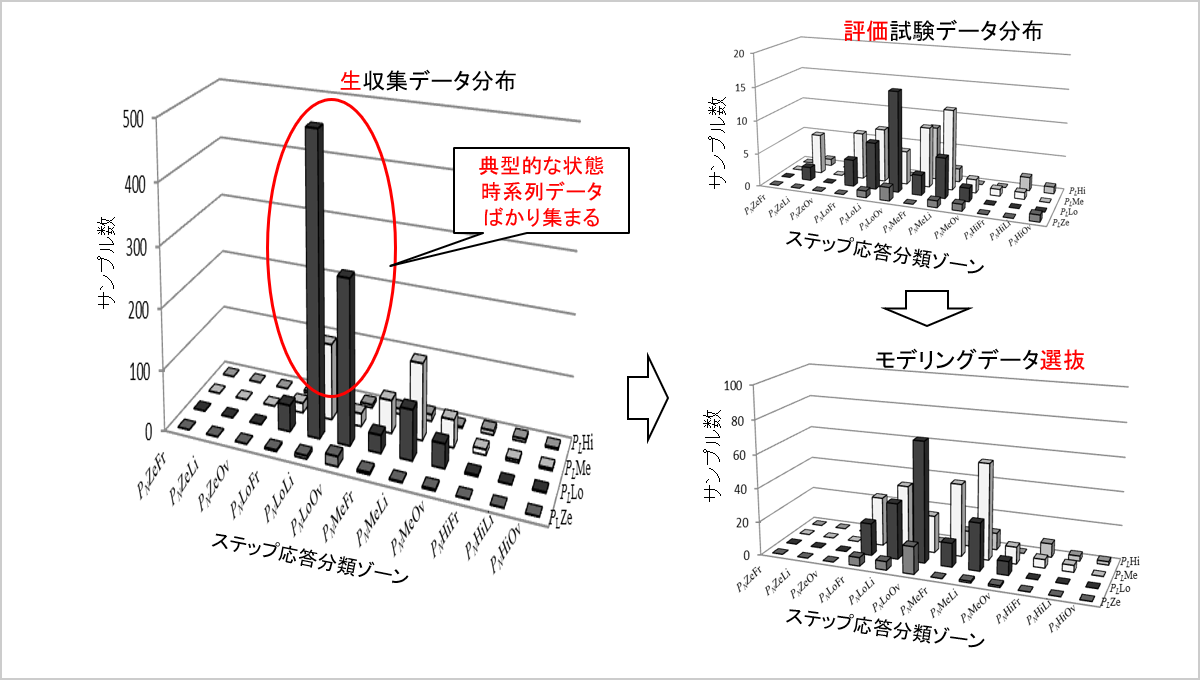
ステップ時系列データ収集の偏り評価
実運用状態から収集した時系列データは、起こりやすい状況の生データばかりが収集されます。
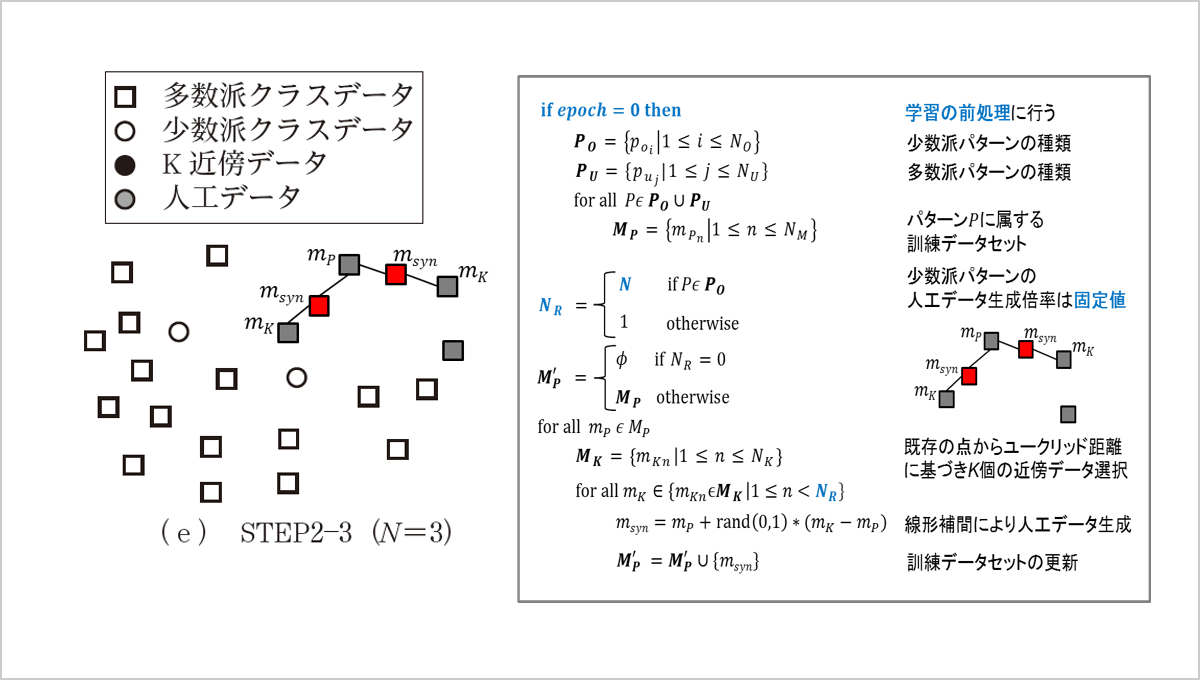
モデル予測精度を評価するデータをあらかじめ用意しておき、そのデータ分布に近づくように学習データを選別することを試しました。
モデル予測精度を評価するデータをあらかじめ用意しておき、そのデータ分布に近づくように学習データを選別することを試しました。